
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |
| 29 | 30 | 31 |
- WeMos D1 mini
- HC-SR04
- TT Motor
- Robot Platform
- miniMe
- N20 Motor
- segway
- kalman filter
- MPU6050
- B-Robot
- wii
- 2 Wheels
- Ardino
- WiFi Control
- 3d printing
- gyroscope
- arduino
- Wiimote
- ESP8266
- DRV8833
- SG90 Servo Motor
- Wiinunchunk
- Wii Remote
- complementary filter
- A4988
- Accelerometer
- gyro
- Self Balancing Robot
- Step motor
- GY-521
- Today
- Total
목록2017/10/20 (2)
Balancing Robot
 Your Arduino Balancing Robot (YABR)
Your Arduino Balancing Robot (YABR)
Your Arduino Balancing Robot (YABR) is a self-balancing robot that you can build yourself as a school project or as a fun project with your kids. It might look simple but there is a lot that you can learn from building this self-balancing robot.In contrast to most self-balancing robots, this one uses stepper motors instead of regular DC motors. The main reason is that stepper motors are precise ..
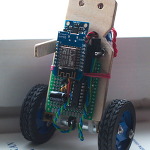 ESPway | A Segway-style WiFi controlled robot built on ESP8266
ESPway | A Segway-style WiFi controlled robot built on ESP8266
Ever since I started tinkering with Arduino and embedded systems, I’ve been pretty excited about building a self-balancing, Segway-like robot. There’s a wealth of similar projects and resources around the Internet.The first prototype was built inside a plastic lunch box. It used an Arduino Nano and infrared remote control. It used the MPU6050 inertial measurement unit for detecting the orientati..